Enabling Reasoning, Secure, and Resilient Autonomy for Heterogeneous Multi-Robot Fleet in Nuclear Domain
This NRC funded project aims to enable reasoning, secure, and resilient autonomy for heterogeneous multi-robot fleet (HMuRF) in dynamic and adversarial nuclear environments.
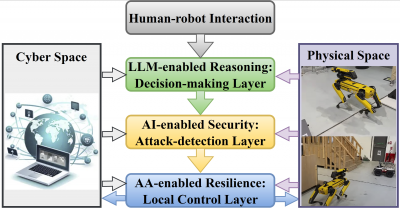
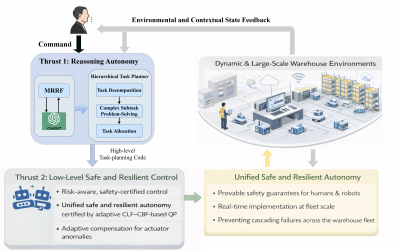
Toward Scalable, Certifiable Safe and Resilient Autonomy for Warehouse-Scale Robotic Systems
Attack-Resilient Reinforcement Learning for Heterogeneous Multi-Agent Systems
The goal of this research is to bring deep reinforcement learning techniques together with attack-resilient control design to improve the resilience of heterogeneous multi-agent systems with completely unknown dynamics under malicious attacks in complex dynamic environments.
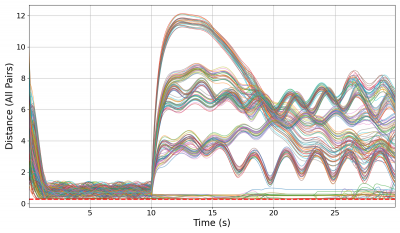
Resilient Control Lyapunov Function-based Quadratic Program for Quadrotors Under Cyberattacks
The goal of this research is to ensure the operational safety and resilience of quadrotors under partial actuator failures, lumped external disturbances, and malicious cyberattacks.
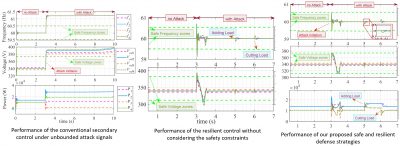
Privacy-Preserving, Safety-Aware, and Attack-Resilient Distributed Cooperative Control in AC Microgrids Against Exponentially Unbounded FDI Attacks
We gratefully acknowledge the supports from:
![]()
![]()
![]()
![]()

